CONAC系列角行程电动执行机构 - 安装调试
CONAC电动执行机构(电动执行器)出厂时的标准设置:输出轴以90°为量程(输出轴水平时为45°),开方向为顺时针方向旋转(定义为正作用)。如果这与您所使用的环境不相符,就一定要对执行机构进行调试,但大多数情况下只需对机械零位和机械满位进行设置即可。
1、机械限位设置CONAC电动执行器(电动执行机构)有三重限位保护功能,它位分别是机械限位、电气限位和软件限位(开关型没有软件限位)。
在设置电气限位和软件限位之前应先设置机械限位,本产品在出厂时已经设定了默认的机械限位位置(图2所示),如果与您的使用要求不符,需要对机构限位位置进行重新调节。
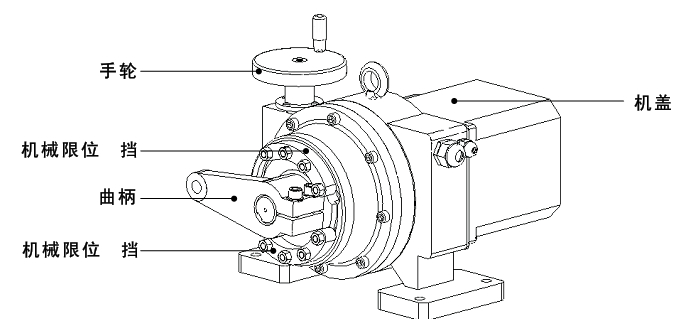
本产品通过调节机械限位止挡来达到调节机械限位位置的目的,图2为出厂时的标准设置,调节时松开限位止挡上面的紧固螺钉,然后调节限位止挡位置,调节好后再拧紧螺钉即可。
图2 CONAC电动执行器(电动执行机构)整机外形及各部件名称
2、电气行程限位开关设置
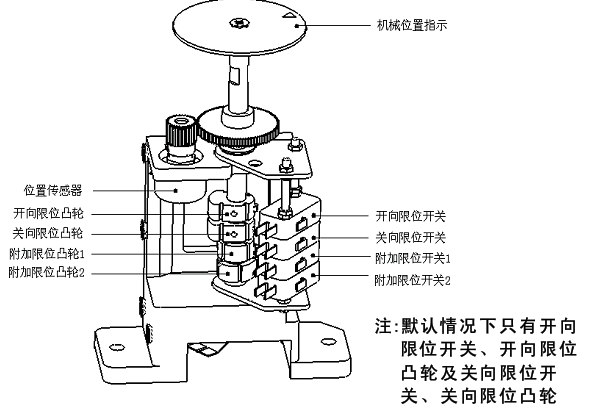
设置行程开关之前请先设置机械限位,工厂已设置行程限位开关近似阀行程90°,这符合阀实际终端位置。限位开关位于位发组件上,打开机盖就可以看见,其结构如图3所示。
1) 拆开机盖(见图2所示);
[开向限位开关设置]
2) 用手操按钮(或手轮,有关手轮的使用方法见第14页"紧急手轮"一部分内容)操动电动执行器到机械满位(全开位置),注意有时走不到规定位置是由于限位开关已经限位或机械限位已经限位所致,如果是限位开关已经限位所致,请参照3~5步操作进行调整;
图3 CONAC电动执行器(电动执行机构)位置发生器组件
3) 断开电源(为安全起见,强烈建议断开电源);
4) 用一字螺丝刀松开开向限位凸轮上的紧钉螺钉;
5) 逆时针方向转动开向限位凸轮(技巧提示:可用螺丝刀拨动),使凸轮曲面碰到限位开关臂,直到开关动作,这时能听到一声轻微“喀嚓声”;
6) 拧紧锁紧螺钉;
7) 电动动作一次,检验一下开关设置;
[关向限位开关设置]
8) 操动电动执行器(电动执行机构)到机械零位(全关位置);
9) 断开电源;
10) 用一字螺丝刀松开关向限位凸轮锁紧螺钉;
11) 顺时针转动开向限位凸轮,使凸轮曲面碰到限位开关臂,直到开关动作,这时能听到一声轻微“喀嚓声”;
12) 电动动作一次,检验一下开关设置。
3、软件限位设置
开关型电动执行器(电动执行机构)没有软件限位,所以这部分内容只针对智能调节型(CA1)和普通调节型(CA2)。
智能调节型的设置方法请见第8页:智能调节型产品调试的“机械零位和机械满位设置”部分内容。
4、智能调节型(CA1)产品调试
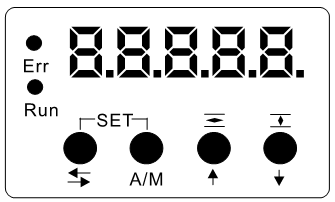
智能调节型有LED数码显示及四个操作按钮(开盖后即可看到),如图4所示:
图4 智能调节型(CA1)操作界面[手/自动切换]即就地与远控之间的切换。上电后,LED显示的运行测量参数,在此状态下短按“”可在三种运行测量参数(见表2)之间切换,短按“A/M”键可在自动与手动之间切换。在手动状态时,LED的第二位小数点会被点亮,此时按“↑”键或“↓”键可操动电动执行机构(电动执行器)。
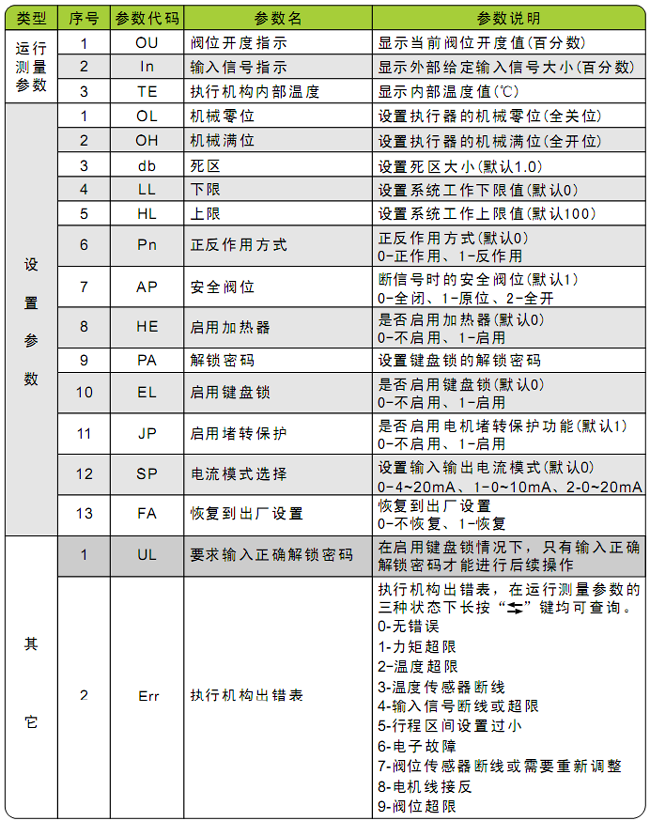
[错误代码查询]当执行机构出现错误时,红色报警灯会点亮,此时按下“[进入参数设置]请在手动状态下短按“SET”键(即同时按下“[机械零位和机械满位设置]即全关位和全开位位置设置。在按照第6页的方法设置好机械限位和行程限位开关限位后,还需要进入参数设置菜单对机械零位和机械满位进行设置。1) 切换到手动状态,操作方法见本页上面“手/自动切换”相关内容;
2) 短按“SET”键(即同时按下“
3) 按“↓”键操动电动执行机构(电动执行器),此时输出轴应逆时针方向(面向输出轴)旋转,显示参数数值应减小,否则证明电机线接反;如果输出轴没有到需要位置而不动,证明已经限位了,需要先对机械限位和行程限位开关限位进行调节(请参考第6页相关内容);
4) 短按“
5) 按“↑”键操动电动执行机构(电动执行器)到另一个终端位置,如果没有到需要位置而输出轴不能转动,可能已经限位,需要先对机构限位和行程限位开关限位进行调节;表1 CONAC智能调节型(CA1)显示代码表
6) 短按“SET”键保存退出;
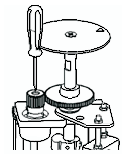
7) 在进行3~6步时有可能出现“Err 7”且红色报警灯被点亮的提示,此时按任意键无响应,这代表需要对位置传感器进行调节,调节方法如下:松开传感器的锁紧螺钉,然后用一字螺丝刀缓慢转动传感器(如图5),在一定位置时,报警灯会熄灭,旋紧锁紧螺灯后再短按“
图5 电动执行机构(电动执行器)位置传感器调整示意图8) 技巧提示:在已经设置好机械限位和行程限位开关限位后,可在机构零位或机械满位设置状态下长按“↑”键和“↓”5秒以上将自动对机械零位和机械满位进行整定,整定完后会自动退出并保存;
9) 关于正反作用,如果您按上面的设置方法设置好后在运行过程中发现机械零和机械满位的位置正好与现场应用情况正好相反,请进入正反作用设置菜单将其参数修改一下即可。
5、普通调节型(CA2)产品调试
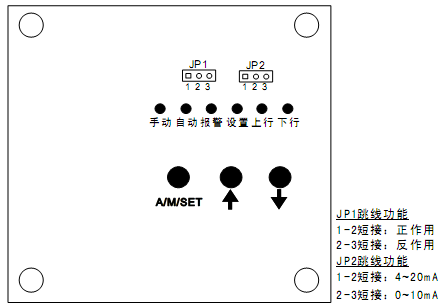
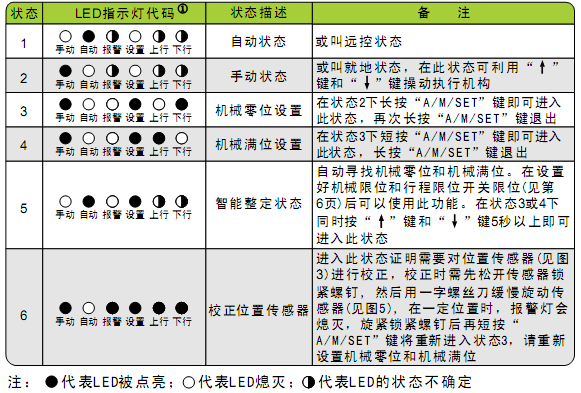
普通调节型的操作界面主要由LED指示灯、键盘和跳线组成,如图6所示。LED代码含义见表3。
图6 普通调节执行器(CA2)操作界面表3 普通调节型电动执行机构(电动执行器)LED显示代码表
[手/自动切换]
即就地与远控之间的切换。上电后系统自动进入状态1(即自动状态),在此状态短按“A/M/SET”键可以进入状态2(即手动状态),再按一次又会进入状态1。
[进入参数设置]
在手动状态下(状态2)长按“A/M/SET”键5秒以上即可进入参数设置状态,参数设置只有两个状态,它们分别是状态3和状态4。在正确设置好参数后再次长按“A/M/SET”键即可退出参数设置状态。[机械零位和机械满位设置]
即全关位和全开位位置设置。在按照第6页的方法设置好机械限位和行程限位开关限位后,还需要进入状态3和状态4对机械零位和机械满位进行设置。
1) 切换到手动状态,操作方法见本页上面“手/自动切换”相关内容;
2) 长按“A/M/SET”键5秒以上即可进入机械零位设置状态(见表3);
3) 按“↓”键操动电动执行机构(电动执行器),此时输出轴应逆时针方向(面向输出轴)旋转,否则证明电机线接反;如果输出轴没有到需要位置而不动,证明已经限位了,需要先对机械限位和行程限位开关限位进行调节(请参考第6页相关内容);
4) 短按“A/M/SET”键切换到机械满位设置状态;5) 按“↑”键操动执行机构到另一个终端位置,如果没有到需要位置而输出轴不能转动,需要先对机构限位和行程限位开关限位进行调节;
6) 长按“A/M/SET”键保存退出;
7) 在进行3~6步时有可能进入状态6,这代表需要对位置传感器进行调节,调节方法如下:松开传感器的锁紧螺钉,然后用一字螺丝刀缓慢转动传感器(如图5),在一定位置时,报警灯会熄灭,旋紧锁紧螺灯后再短按“A/M/SET”键将重新进入机械零位设置状态,请重新设置机械零位和机械满位。
8) 技巧提示:在已经设置好机械限位和行程限位开关限位后,可在机构零位或机械满位设置状态下长按“↑”键和“↓”5秒以上将自动对机械零位和机械满位进行整定,整定完后会自动退出并保存;
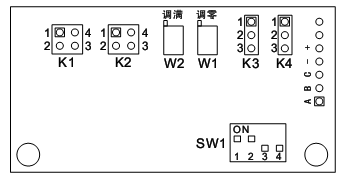
6、开关型(CC)产品调试CC2型和CC3型这两型产品只需要设置机械限位和行程限位开关限位即可(见第6~7页相关内容),CC1型在设置好机械限位和行程限位开关限位后还需要调节机械零位和机械满位处的位置反馈电流。CC1型内置一位置变送器电路板,如图7所示。
图7 CONAC执行器位置变送器电路板[位置反馈电流调节]
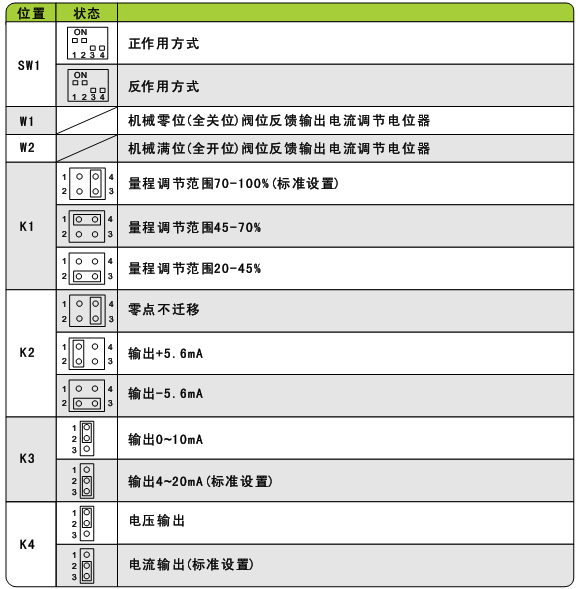
1) 此处以正作用方式(即输出轴顺时针方向旋转为开)为例,若您的使用环境为反作用方式,请先将电路板上的拨码开关拨向反作用方式(开关及跳线设置方法见右侧表4),并将用户接线的第3和第4脚对调(见第5页)后进行调试;
2) 操动电动执行机构(电动执行器)到机械零位(全关位)后再操到机械满位(全开位),在此期间测量电路板BC脚间(见图7)电压变化是否在0.05V~2.45V以内线性变化,否则请将位置传感器锁紧螺钉松开后调节位置传感器(见图5),使其满足上述要求;
3) 将电动执行机构(电动执行器)操到机械零位,调节“调零”电位器,使位置反馈输出电流为4mA(以4~20mA为例);
4) 将电动执行机构(电动执行器)到机械满位,调节“调满”电位器,使图2所示反馈输出端的输出电流为20mA;
5) 重复3~4步几次,直到“调零”和“调满”电位器都无需调节为止,以便达到较高精度;6) 技巧提示:如果始终调不出4~20mA,请配合K1和K2跳线功能(见表4)进行调试。表4 CC1型电动执行机构(电动执行器)所配位置变送器跳线、电位器及拨码开关功能表
联系我们
地址:重庆・北碚 |
|